A* Pathfinding Algorithms
Advanced pathfinding algorithms with limited visibility and comprehensive performance benchmarking
Project Overview
View on GitHubRepeated A* is a pathfinding approach for environments with limited visibility. The algorithm plans a path with current knowledge, follows it until discovering new obstacles, then replans from the current position. This process repeats until reaching the goal, making it ideal for robot navigation and other real-world scenarios.
This project implements three variants with configurable tiebreaker strategies, sight radius settings (1-20 cells), and algorithm types (Forward, Backward, or Adaptive). The application provides comprehensive tools for comparing how these parameter choices affect performance across different maze configurations.
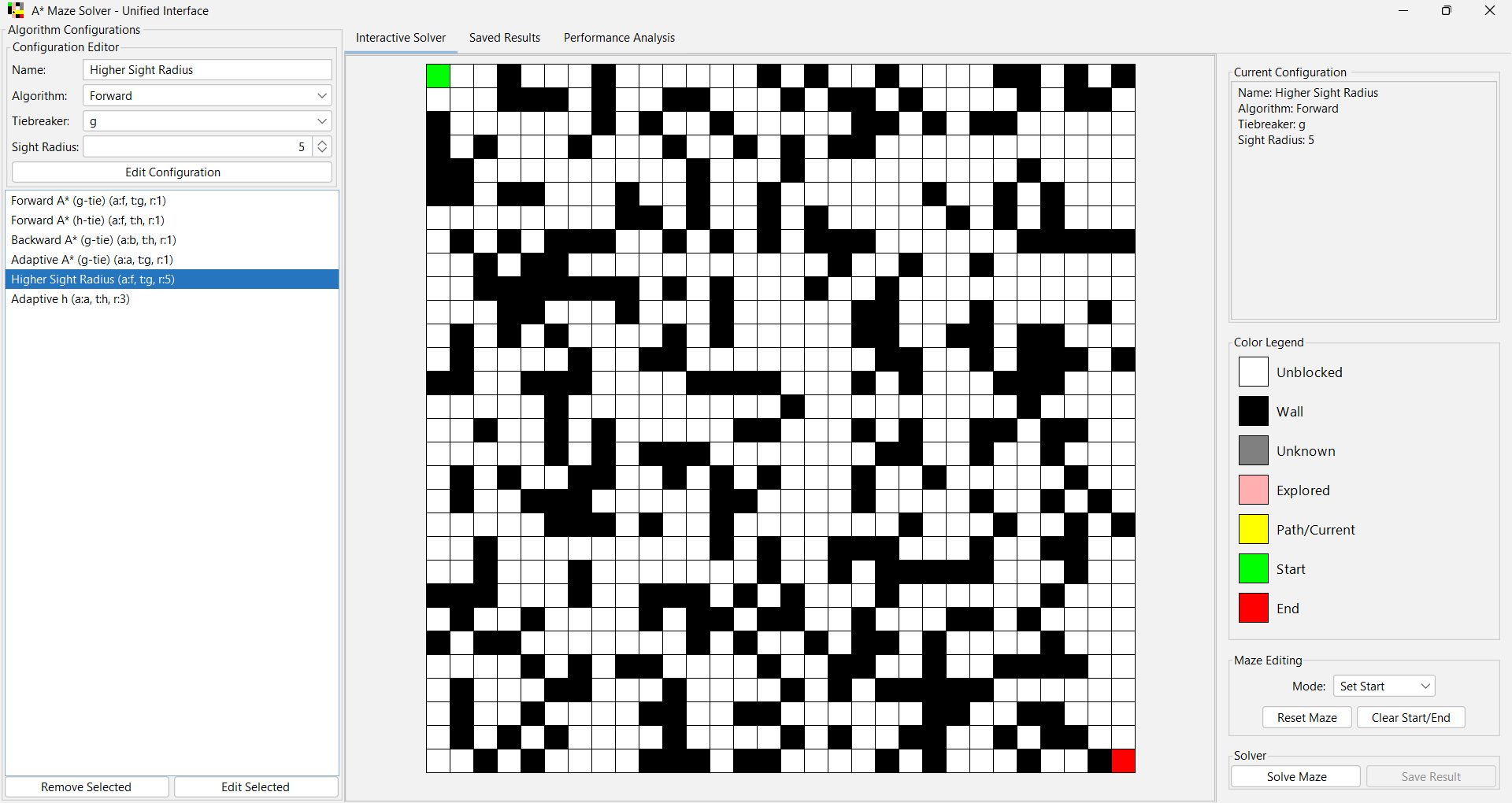
Interactive Maze Solver
The main interface features three integrated modes: Interactive Solver, Saved Results, and Performance Analysis. Users can create custom mazes, configure algorithm parameters, and watch real-time pathfinding visualization.
The left panel provides comprehensive algorithm configuration options, including tiebreaker strategies, sight radius settings, and algorithm type selection. All settings persist between sessions for consistent testing.
Real-Time Algorithm Visualization
Watch algorithms explore the maze in real-time, showing explored cells, the current frontier, and the final optimal path. The sight radius limitation creates realistic partial observability.
Different colors represent various cell states: unexplored (white), explored (light pink), current planned path (yellow), goal (red). The visualization updates dynamically as the algorithm progresses.
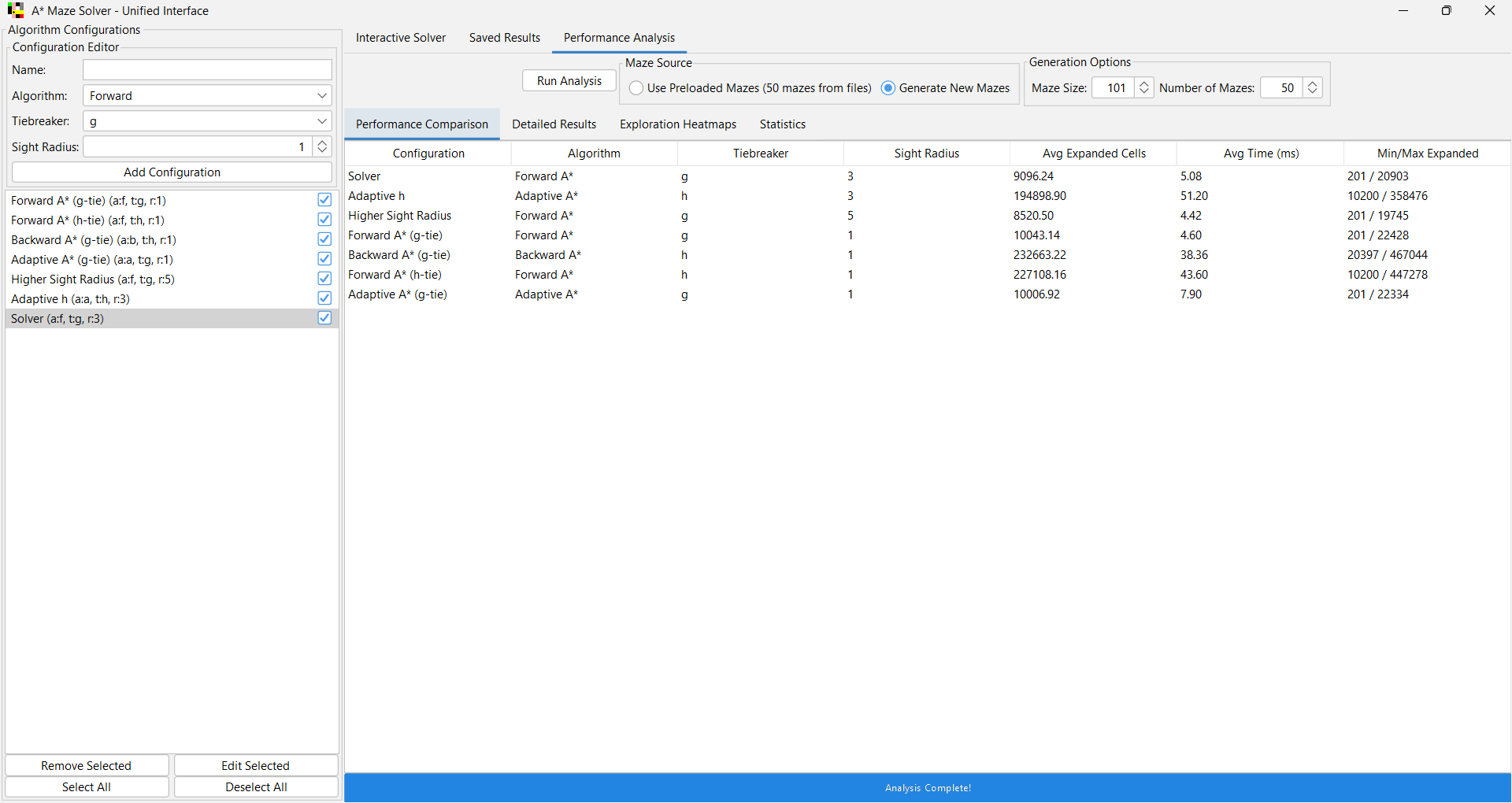
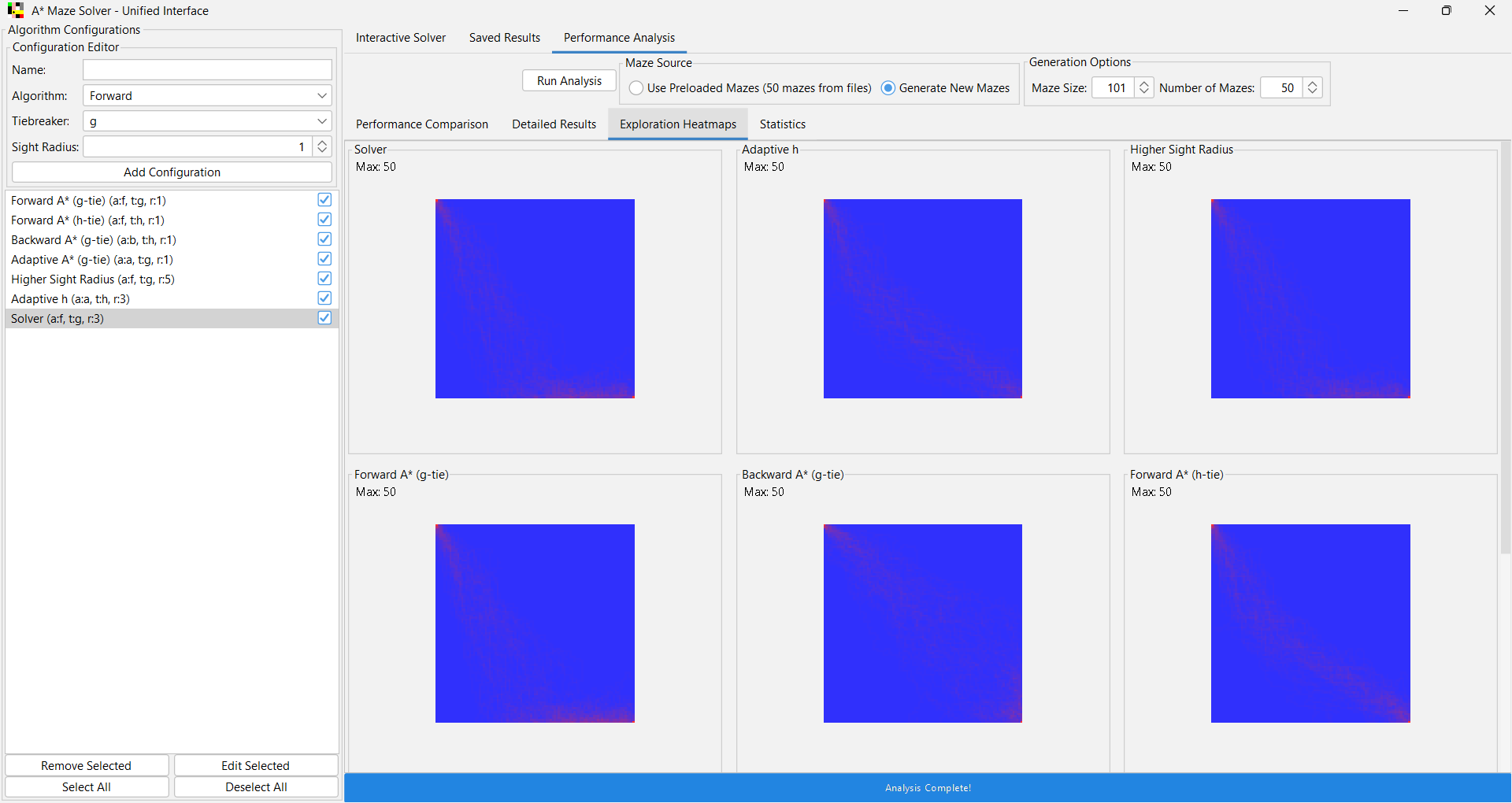
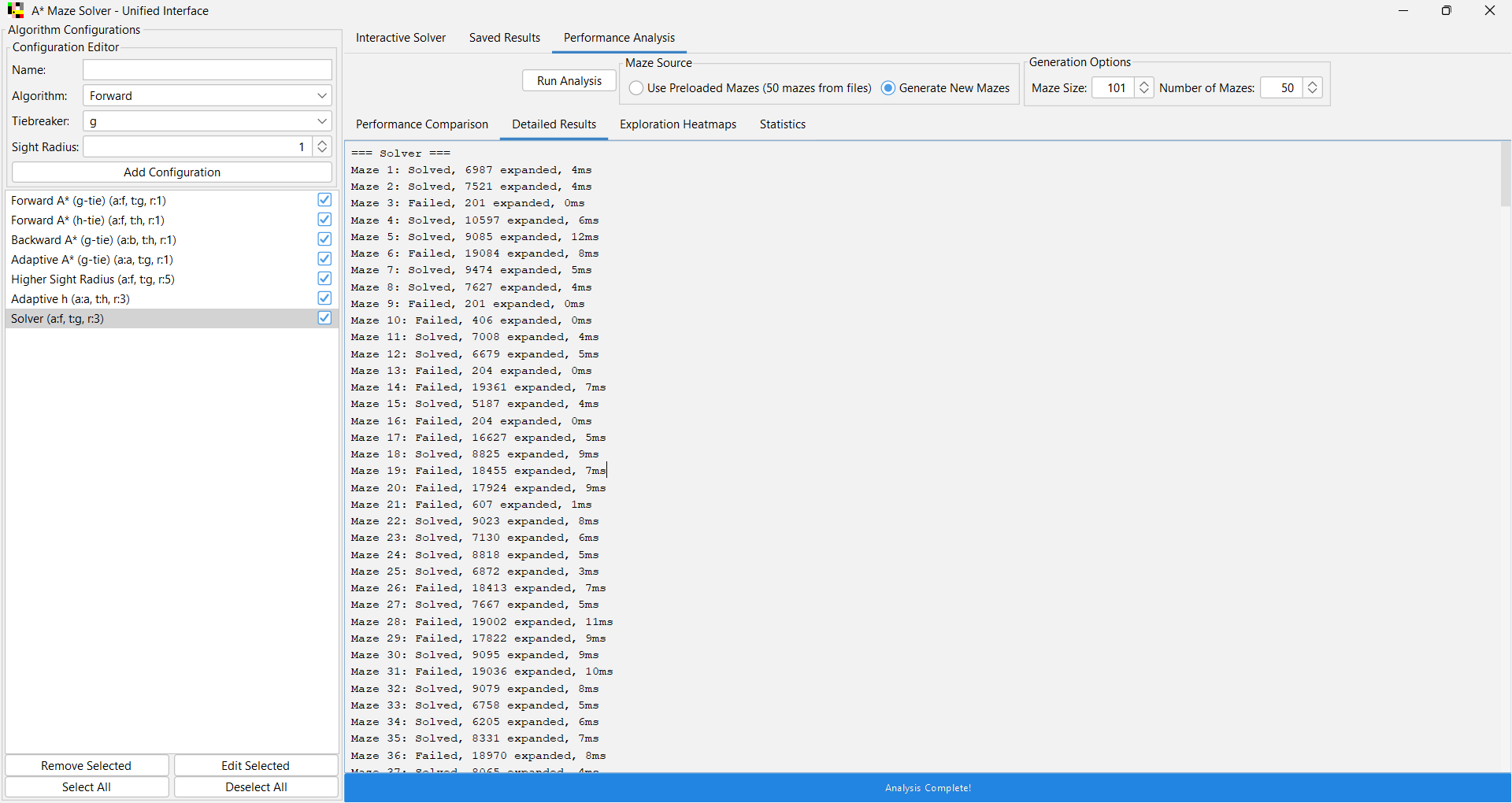
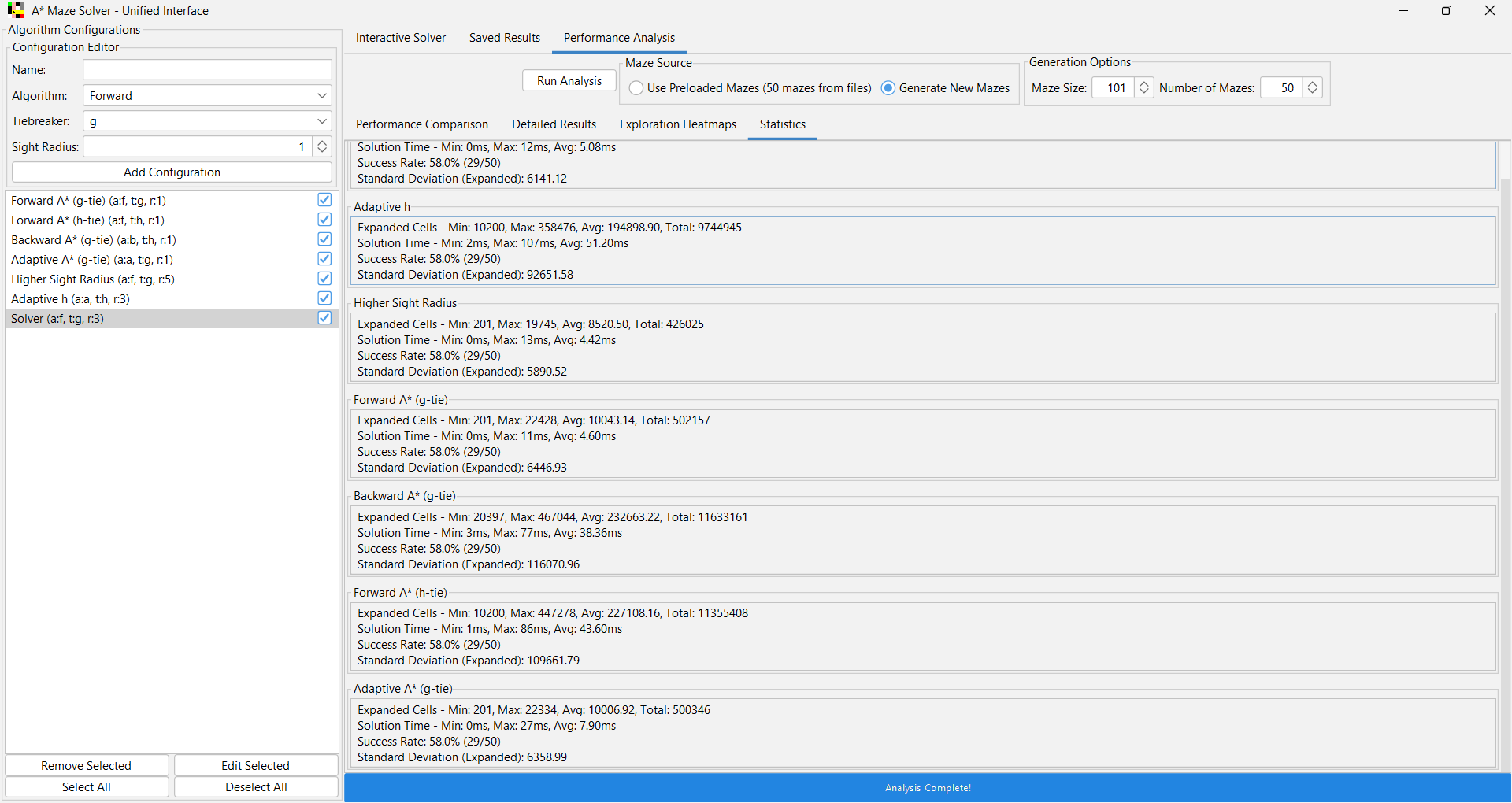
Performance Analysis & Heat Maps
Comprehensive performance analysis with heat map visualizations showing exploration patterns, statistical comparisons between algorithms, and detailed performance metrics.
Run batch tests across multiple mazes to compare algorithm efficiency. Heat maps reveal how different parameter choices affect exploration patterns and overall performance characteristics.
Technical Implementation
Algorithm Variants
Repeated Forward A*: Plans from current position to goal, replanning when new information is discovered.
Repeated Backward A*: Plans from goal to current position. Less efficient because searches encounter unknown areas late in the process, requiring extensive computation to find new paths toward the agent's current location, whereas forward search operates in a smaller known area.
Adaptive A*: Learns improved heuristics from previous searches by updating distance estimates based on actual path costs discovered, becoming more efficient with repeated use.
Limited Knowledge Simulation
The algorithms operate with partial observability through a configurable sight radius (1-20 cell radius). This simulates real-world scenarios where complete environment information isn't available.
Agents must explore the environment while pathfinding, discovering walls and open spaces within their sight radius as they move through the maze.
Performance Analysis
Comprehensive benchmarking across 50 predetermined mazes reveals significant performance differences:
| Algorithm | Avg Expanded Cells | Avg Time (ms) |
|---|---|---|
| Repeated Forward A* (g-tie) | 9,847 | 12.3 |
| Repeated Forward A* (h-tie) | 254,891 | 45.7 |
| Repeated Backward A* (g-tie) | 125,432 | 28.9 |
| Adaptive A* (g-tie) | 9,623 | 13.1 |
Data Structures & Architecture
Custom Priority Queue: Optimized for A* search operations with efficient priority updates.
Modular Design: Clean separation between algorithm logic, UI components, and data management.
Cross-Platform Support: Smart build system with dual launchers for end users and developers.
Key Features
- Interactive maze editor with multiple editing modes
- Real-time algorithm visualization
- Configurable parameters (tiebreaker strategy, sight radius)
- Heat map generation showing exploration patterns
- Persistent configuration management
- Result export/import system
- Comprehensive unit testing
Software Engineering
The project demonstrates professional development practices including:
- Smart build detection (only rebuilds when necessary)
- Cross-platform launcher system (Windows/Unix/macOS)
- Clean project organization with proper separation of concerns
- Comprehensive documentation and README
- Professional error handling and user feedback
Core Algorithm Implementation
Here's a simplified version of the A* search implementation:
public class MazeSolver {
private PriorityQueue openList;
private Set<State> closedList;
private int sightRadius;
public SolveResult solveMaze(char[][] maze, Coordinates start, Coordinates goal) {
openList = new PriorityQueue();
closedList = new HashSet<>();
State startState = new State(start, 0, calculateHeuristic(start, goal));
openList.add(startState);
while (!openList.isEmpty()) {
State current = openList.poll();
if (current.getPosition().equals(goal)) {
return reconstructPath(current);
}
closedList.add(current);
// Explore visible neighbors within sight radius
for (Coordinates neighbor : getVisibleNeighbors(current.getPosition(), maze)) {
if (closedList.contains(new State(neighbor, 0, 0))) continue;
int tentativeG = current.getG() + 1;
State neighborState = new State(neighbor, tentativeG,
calculateHeuristic(neighbor, goal));
neighborState.setParent(current);
if (!openList.contains(neighborState) ||
tentativeG < neighborState.getG()) {
openList.add(neighborState);
}
}
}
return new SolveResult(false, closedList.size(), 0);
}
private List<Coordinates> getVisibleNeighbors(Coordinates pos, char[][] maze) {
// Return neighbors within sight radius that are not walls
// Implementation handles partial observability
}
}Installation & Usage
Download from GitHub
Prerequisites: Java 17 or higher
Clone the repository:
git clone https://github.com/Electrolyzer/A-Star_Maze_Solvers.git
Navigate to directory:
cd A-Star_Maze_Solvers
Or download the ZIP file directly from the GitHub repository.
Quick Start
Launch the application with smart build detection:
Windows:
.\launcher.bat
Unix/Linux/macOS:
./launcher.sh
The launcher automatically builds the project if needed and starts the application.
Development Mode
For development with forced rebuilds:
Windows:
.\dev-launcher.bat
Unix/Linux/macOS:
./dev-launcher.sh
Development launchers always clean and rebuild the project before running.
Using the Application
- Interactive Solver: Create and edit mazes, configure algorithms, watch real-time solving
- Saved Results: Load and analyze previously saved maze solutions
- Performance Analysis: Run batch tests, compare algorithms, view heat maps